KINEMATICS—JACOBIAN
1. 速度矢量与角速度矢量
速度矢量:
(1) 需要说明矢量是相对于哪一个坐标系进行求导,比如,
本身是B系中的速度矢量, 是B系中的速度矢量在A系中的描述。由于是对位移的微分,所以和坐标系间的平移无关,仅使用旋转矩阵就可以完成坐标系描述的变换: . (2) 常需要讨论坐标系原点的速度,
,该式表示的是原点相对于世界坐标系U的速度。要注意 表示的是C的原点相对于T坐标系的速度,而 表示的是C的原点相对于世界系的速度在T坐标系中得表示。前者表示出了两个坐标系间得相对关系。如96页得例题5.1,计算 要计算火车和轿车沿X轴得速度差, 仅仅是轿车在世界中的速度在T系中的表示,没有描述出两者得相对关系。 角速度矢量:
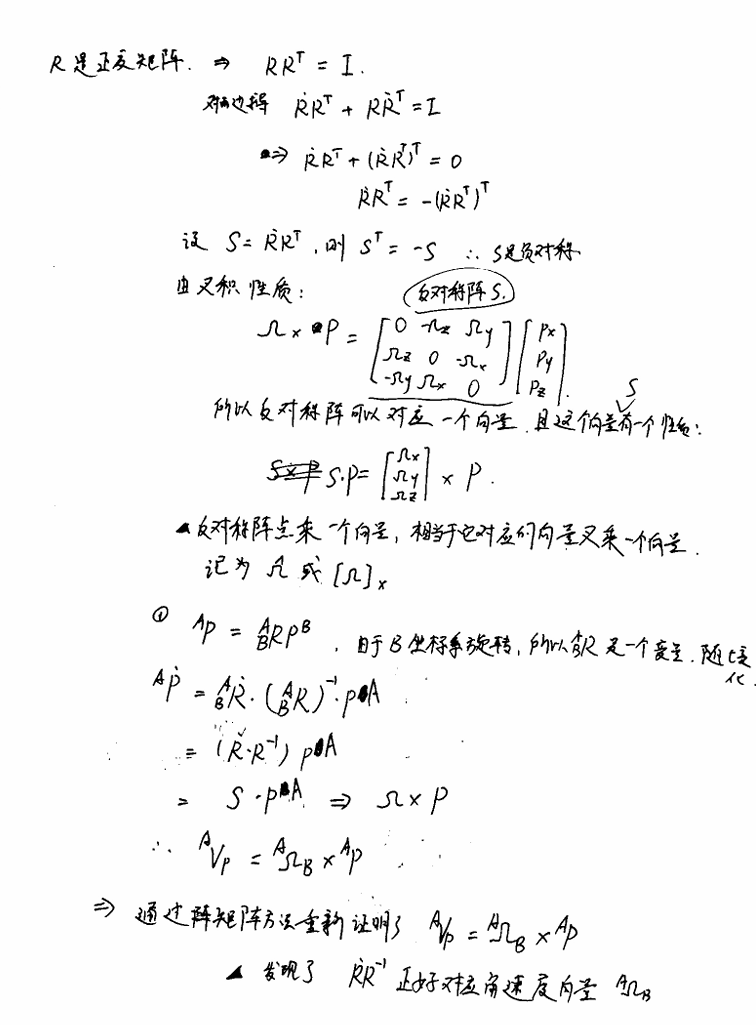
角速度矢量使用
表示,它是一个三维向量,向量的方向是U中的旋转轴,模长为角速度。
2. 刚体的线速度和角速度
线速度:求解B系中向量Q的速度在A系中的表示,将两个速度向量相加就可以表示:
角速度:在如图所示的系统中,假设Q相对于B坐标系静止,B相对于A的旋转使用矢量
表示。
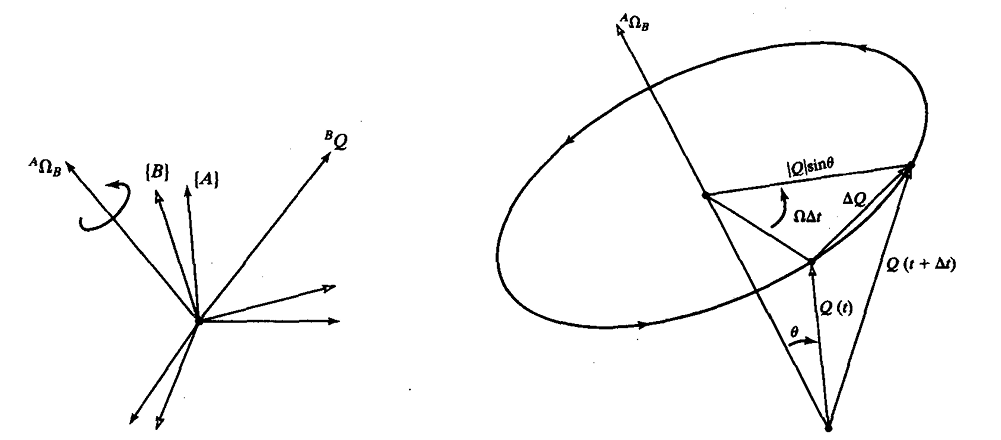
可以在坐标系A中表示Q的微分,几何关系如右图所示,把
把公式改写为叉乘,除以Δt:
最后,加上Q相对于B坐标系的运动和相对于固定坐标系A,B的运动,可以联立线速度角速度公式得到:
3. 对角速度的研究
补充一点:角速度也可以用其他的方式表示,比如欧拉角的变化率。欧拉角的变化率是描述姿态的几个角度每秒变化多少,但不能它直接表示角速度,要加一个变化矩阵,具体先不展开:
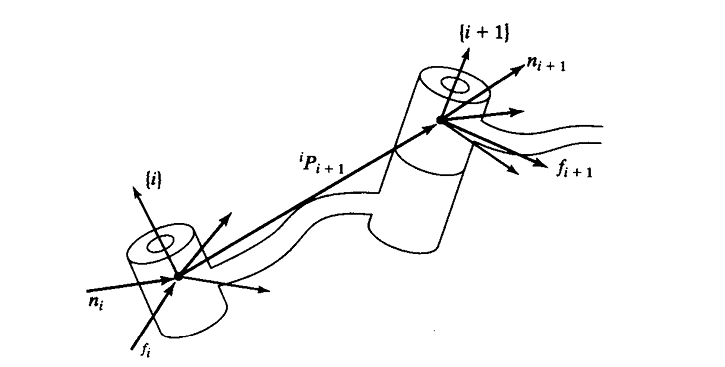
4.重点:连杆之间的速度传递
首先给出系统的图片:
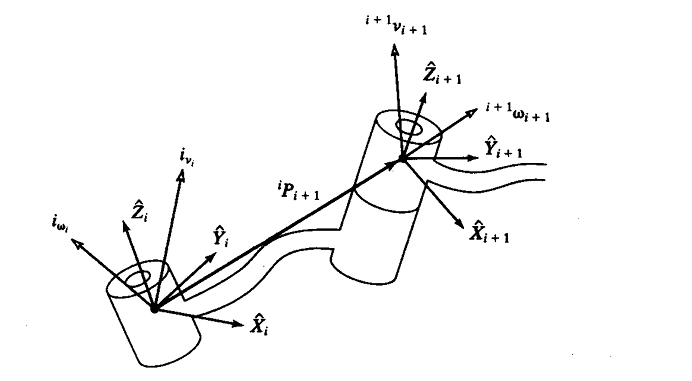
当两个
矢量都是相对于相同的坐标系时,可以直接相加。比如说双杆系统,两个角度速度相加,得到的是第二个杆整体的角速度,要看作是这个杆整体对于初始坐标系的夹角,而不是杆上的某一个点的向量。 由此可以轻松得到角速度公式:
,这是相对于参照系i的,再将其整体左乘旋转矩阵可以得到递推式: 而线速度的传递,是下一个关节的线速度由前一个关节的线速度加上连杆的旋转线速度组成,公式为:
,左乘旋转矩阵得到递推式: 如果下一个关节为移动关节,也可以用同样的方法进行推导,仅仅是在线速度中加入了d的速度。
2和3中的两个递推式,可以用来手推机械臂末端速度的解析公式,它们也可以直接写成程序,让计算机一节一节递推,求任意机械臂的速度。如果我们提前把公式手算化简好,计算机以后代入计算时会更省计算量。
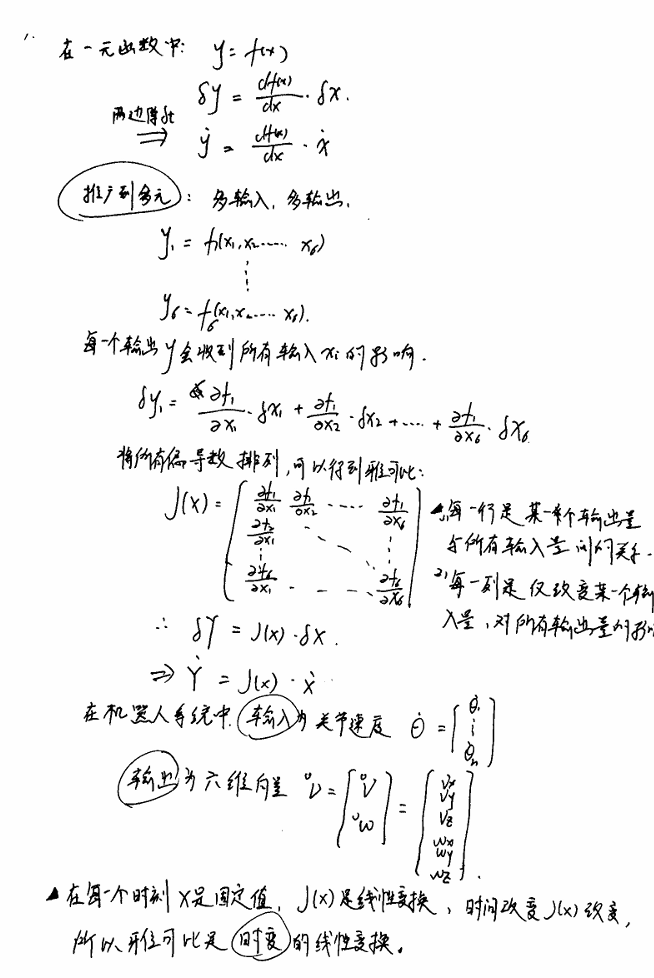
5. 雅可比
6. 奇异性
- 如果雅可比矩阵可逆,就可以通过笛卡尔速度,求出关节的速度。但是大多数机械臂都有使得雅可比矩阵奇异的
值,这个位置称为机构的奇异位形,简称为奇异性。 - 奇异性大致分为两类:在工作空间边界的奇异位形和工作空间内部的奇异位形。
- 比如说,二连杆系统中,两个关节全都伸直,此时如果关节 1 或关节 2 转动,末端的瞬时速度都主要是垂直于机械臂方向的。也就是说,末端可以上下扫动,但是不能沿着手臂伸直方向继续往外走,所以这个方向的速度无法产生,会失去自由度。其中一个关节角度为180度时同理,这就是工作边界的奇异位形。
- 根据水平速度分解:
,可以看出当水平角度趋近于0时, 会变得无穷大。由此可以看出当操作臂接近奇异点位置时,关节速度会趋于无穷大。
7. 静力
本节为连杆上的静力的推导以及力矩的推导。单个连杆的系统图如下:
力矩:
力矩方向遵循右手定则,四指指向r的方向,然后向力的方向弯曲,大拇指朝向为力矩方向。 对于每个关节来说,想要保持静止都要满足力平衡和力矩平衡。相邻的杆之间传递的力矩除了推/拉力施加的力矩,还有扭转效果导致的力矩。比如说,手拿一根棍子,别人会向下按的同时还拧棍子。
定义
是i-1施加在i上的力,根据力平衡可以得到: 同样的通过2中所说的力矩平衡:
因为力本身没有“位置坐标”这个概念,不受原点平移的影响,可以直接使用旋转矩阵。一般只有点的位移才使用齐次变换阵。由此可以得到连杆之间的静力传递表达式:
最后,计算关节轴矢量和施加在连杆上的连杆矢量的点乘,计算出关节驱动力
: , 是用来抵消下一级连杆带来的扭矩的。
8. 力的雅可比
- 令位移趋于无穷小,就可以使用虚功来分析静止的情况。
这里关键就是,通过雅可比
- 雅可比不满秩时,有的末端力就不能通过关节力矩来实现。在
的零空间中的这些向量,对关节力矩没有贡献,有可能由机械结构本身来承担。在伸直状态附近,如果末端力沿着杆方向,杆件主要承受轴向拉压。杆件很擅长承受轴向力,而关节几乎不用输出力矩,机械效益趋向于无穷大。也就是说,运动能力差的方向,往往承力能力强;运动能力强的方向,承力能力相对弱。
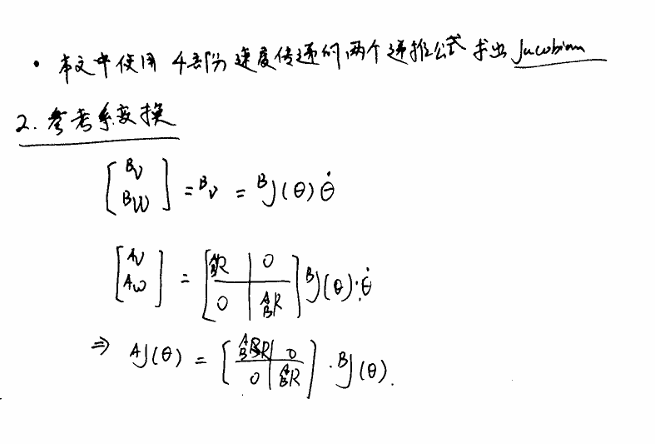
9. 速度和静力的笛卡尔变换
这里的速度变换不同于第五小节中的雅可比变换,第五小节中是给同一个向量转换不同的坐标系,在这里的笛卡尔变换其实是连杆间关节点的递推,也就是说换了参考点。
由第四小节中的递推公式可以得到广义速度表达式的变换矩阵:
同样,由第七小节中的力和力矩递推公式,可以得到: