一. Kinematics 运动学
1. 空间变换
位姿(pose): 由位置和姿态组成。位置由一个3维向量描述,姿态由旋转矩阵描述。
旋转矩阵:
是在A坐标系下B坐标轴的矩阵,矩阵由B的三个基向量组成。每列相当于两个坐标轴原点重合时B的基向量在A中的分解。所以也可以写成 ,因为基向量都是单位向量,所以实际上就是 在A中关于各轴的投影。可以发现每行其实是A在B中的投影,因此旋转矩阵的转置就是 ,且根据正交矩阵的性质,旋转矩阵的转置等于逆矩阵。 完整的位姿描述可以使用齐次变换阵T,把R和P放到了同一个矩阵中便于推导公式,实际计算机计算中一般不使用。
平移,旋转,变换算子对坐标点进行左乘,是对向量进行运动操作,而齐次变换阵矩阵是不同坐标系间的坐标转换,结果相同,一个表示变换过程,一个是静态的坐标系转换。
复合变换,左乘即可。可以根据下标消除的性质,简单的标出坐标系的变换方向(如O—A—B),然后通过左乘快速得到想要的变换。
2. 补充:手眼标定(EYE-IN-HAND)
手眼标定的目标是找到机械臂末端E和相机C间的变换矩阵T。其中,
最后通过
3. 正运动学 FORWARD KINEMATICS
关节分为转动关节和移动关系,通过连杆连接在一起。
四个参数:
是两个关节轴之间公垂线的距离, 叫做连杆长度。 是令前一个轴围绕 转动后可以与与下一个轴平行的角度,正负遵守右手定则,右手大拇指方向向着 方向。叫做连杆扭转角。 叫连杆偏距, 加关节角,移动关节 为变量, 为定值,反之亦然。这四个参数可以描述的位置关系,因此通过他们组成的DH阵就可以描述一个完整的连杆系统。 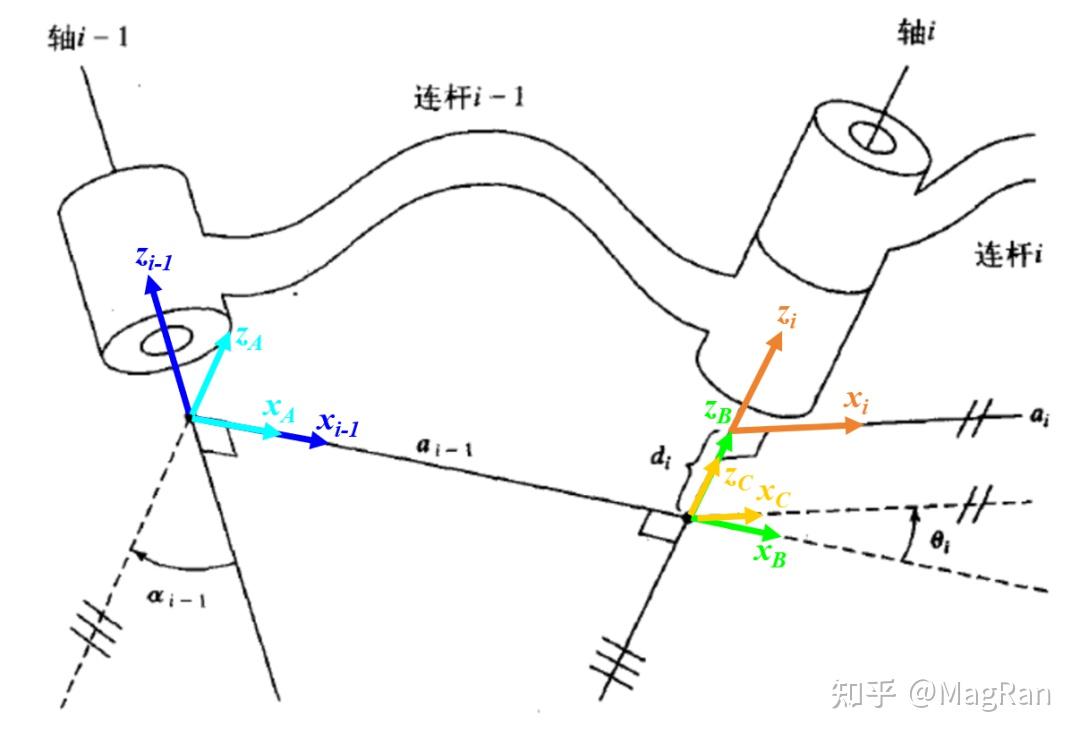
由上图可以看出建立连杆坐标系时,可以简单地沿着关节轴的方向标出每个关节的Z轴,沿着a方向标出X轴,然后就可以建立DH阵表示连杆坐标系。值得注意的是,两个Z轴相交时,X方向要垂直于Z轴,此时a的值为0。{0}坐标系是{1}坐标系的关节变量为0时的坐标系。
DH阵:由
, , 四个参数组成。 有了机械臂的各参数就可以使用坐标变换进行正运动学求解。给两个关节间的坐标系之间建立P,Q,R三个中间坐标系,如下图所示:
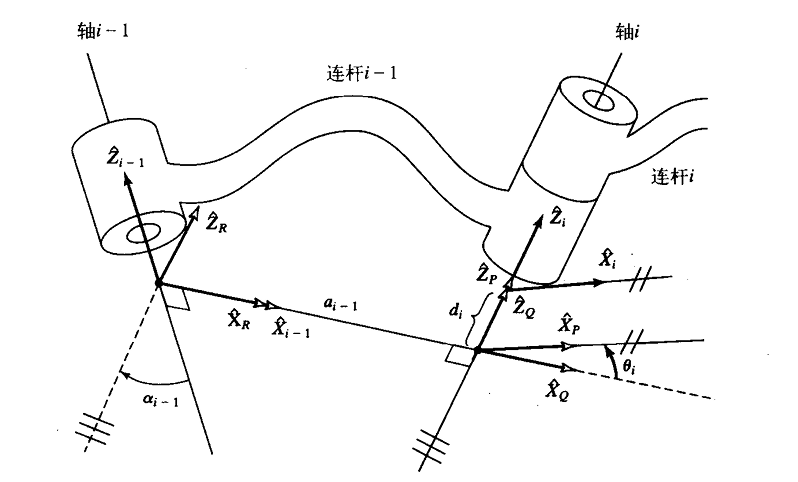
由1中的坐标变换内容,可以轻易的通过四个坐标变换矩阵T的连乘得到两个关节坐标系间的变换矩阵,每个小的变换矩阵仅仅包含一个参数,使用坐标变换算子表示,也可以使用两个
的连乘表示,这个矩阵表示沿着Q方向平移r,旋转 的变换矩阵。那么两个矩阵分别就是绕着 轴旋转 度、平移d的变换矩阵和绕着 旋转 度、平移 的矩阵。具体公式如下所示:
其中,最后一个矩阵可以简单地通过两个screw矩阵相乘得到。
有了这些每个连杆间的变换矩阵就可以通过乘法得到末端相对于极坐标系的坐标。
驱动器空间:电机,液压杆等器件的运动参数,如电机旋转角度等。
关节空间:由关节变量构成的关节向量。
笛卡尔空间:末端执行器在三维坐标系中的位置和方向。
正运动学就是从关节空间到笛卡尔空间的转换。