CONTACT
1. 接触运动学
接触运动学研究的是:两个或多个刚体在不互相穿透的前提下,彼此之间可以怎样相对运动。定义一个距离函数
, q描述两个物体的位姿。d>0时两个物体分开,d<0两个物体互相穿透,不可接受。d=0时,进行一阶分析,通过 的负号判断有没有分离的趋势,之后再进行二阶分析,以此类推。**只有当d的所有时间导数都为0时,才能保持接触。**一阶公式: 定义接触切平面和接触法向量。接触分为:B:breaking free R: rolling contact S:sliding contact三种模式。
本文主要进行一阶分析,如果两个刚体是单点接触,且保持接触,那么就是一种roll-slide motion。roll-slide motion是对rolling和sliding的总称呼。保持接触的约束为
,这是对位置层面的约束,而保持接触的必要条件是 ,这表示在法向方向上没有分离或者穿透的趋势。公式如下:
当该式>=0时,表示不穿透,包括了>0时的B状态,和=0时的保持接触状态。
引入 twist
以及 wrench 代替公式中的法向量和速度,得到新的公式: 其中
是动力学中的6维速度向量,而 是力矩和力组成的六维向量: rolling contact满足约束条件:
,接触点没有相对运动。rolling包含真正的滚动和两个物体的接触点相对静止,也可以叫sticking contact。 sliding contact的A,B在接触点速度不相同,沿着切平面相对滑动。
多接触问题:物体A和其他m个物体发生n个接触,接触的数量大于物体数量。使用
表示,其中j是物体编号,i是接触编号。对每一个接触进行限制, ,最后会得到一个可行域: V是A所有可运动方向的集合,多个约束把物体A能动的方向切出一个区域,如图所示,阴影区域为速度可行域:
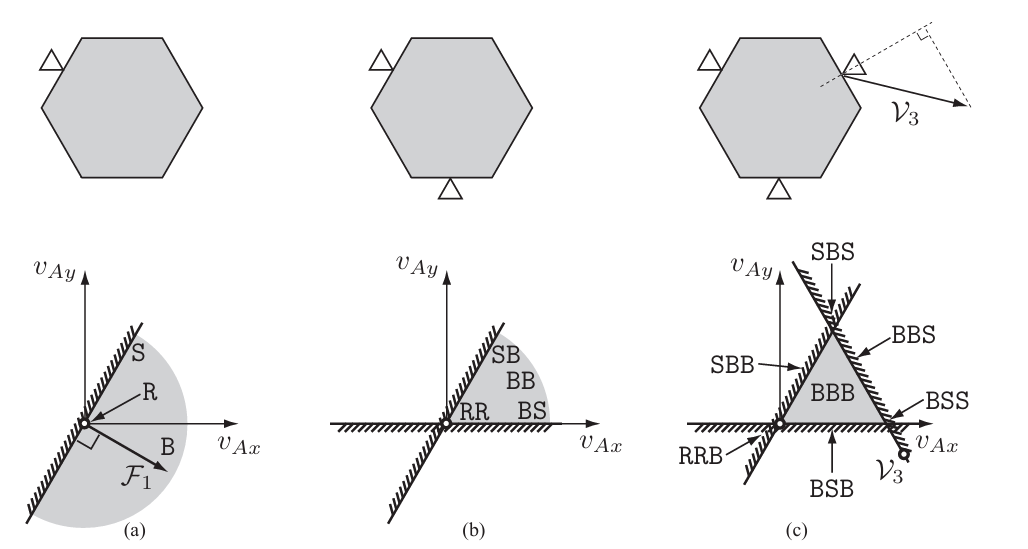
redundant constraint表示该接触没有进一步限制物体的运动。
form closure表示多个接触完全约束了物体的运动,物体只能保持静止。
2. Friction
- Coulomb friction,库仑摩擦:
, 是切向摩擦力, 是法向压力。 - 摩擦锥:有了摩擦力之后,接触力可以不用完全与法向量方向重合,可以偏离,且切向分量不能超过静摩擦力:
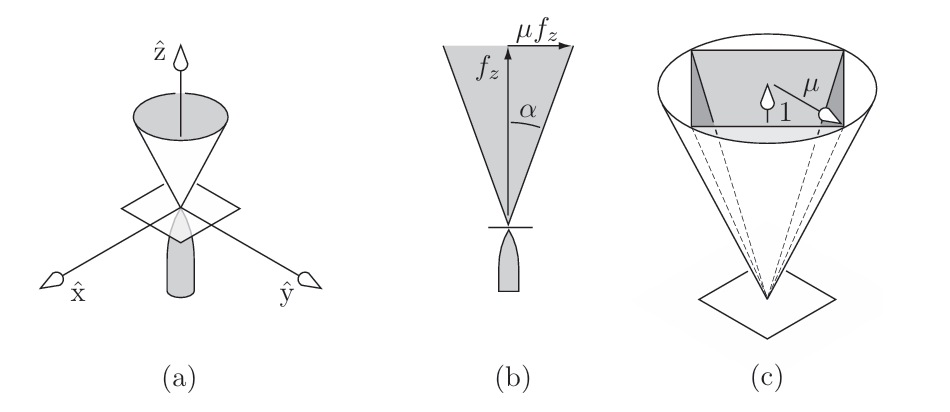
如上图所示,(a)中的锥就是摩擦锥,这是所有力的可行区域,(b)展示的是摩擦角,摩擦系数越大摩擦角越大。力在摩擦锥内部表示接触没有相对运动,在外部表示会产生滑动,而在边界上表示达到了最大静摩擦,马上滑动或者正在滑动。
为了把接触问题变成线性问题,把圆形摩擦锥近似成多面体,(c)中就是近似成了四棱锥。分为内接锥和外接锥,内接锥会低估可用摩擦锥,如果在抓取时想保证安全可以使用内接锥。
wrench cone:把接触点的力变成
,加入了力矩的限制。如图所示:
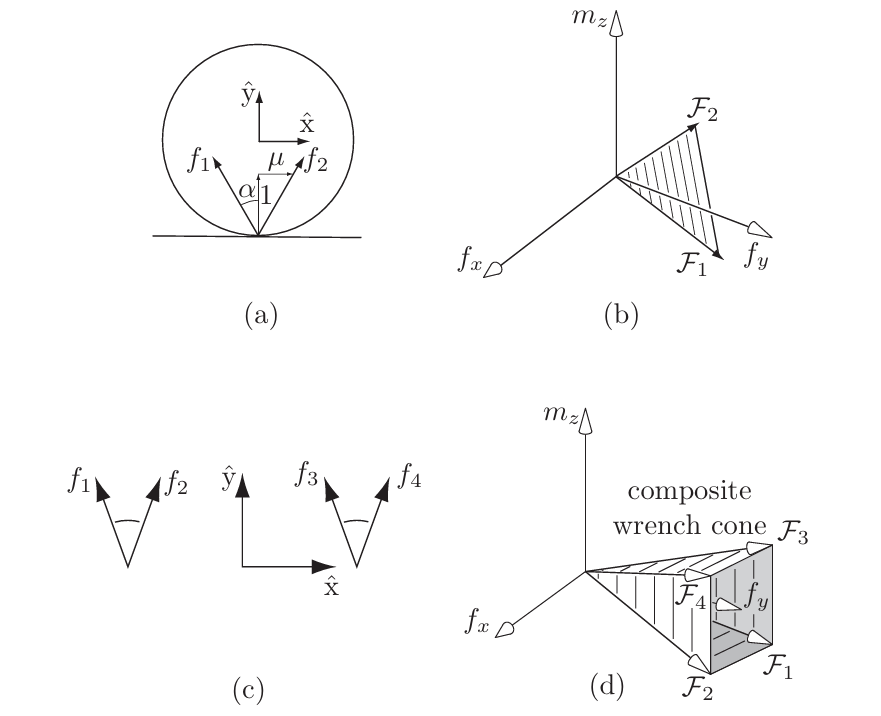
图中的(a)是平面摩擦锥,(b)是wrench cone。而多个接触共同作用在同一个物体时,总wrench是把所有的wrench加起来,如(d)中所示。
- 接触的运动约束数量和接触wrench自由度数量相等,比如说,B是分开了不限制运动也不传力;S是滑动,只限制法向量,摩擦方向被滑动方向决定,只有大小自由;R的运动限制最多,在三维中是3,平面中是2。
3. Constrained Dynamics
- 将接触对运动的限制写成公式:
,表示有k个约束。 - 约束力和允许的速度方向正交,所以不做功:
。 把约束力写成: 有k个约束,就有k个约束力大小,这个公式是把约束力大小转换成了关节空间中的力矩。 因为 所以可以看出约束力确实不做功。 - 将约束写入动力学方程,最关键的公式有如下两个:
对速度约束求导,变成加速度约束:
把λ回代到加速度公式中,可以得到:
P会把关节力投影成做功的力成分。I-P会把力投影到约束方向。逆解运动学时,可以任意加上约束力
同样地,还有加速度投影矩阵:
4. Impedance Control
接触时,有些方向适合控制运动,有些方向适合控制力。比如说机器人写字时,沿着纸面方向:控制笔尖轨迹,垂直纸面方向:控制笔尖压力。
impedance:外力扰动作用到机器人末端时,机器人运动会产生多少改变,简单地说就是机器人到底硬不硬。高阻抗时,推机器人,机器人不动,所以理想的运动控制需要高阻抗。写字时,不希望外力扰动可以轻易地让它偏移。而理想的力控制需要低阻抗,控制力时,一点的误差就会产生巨大的接触力,这会损坏机械结构造成危险。比如机械臂压桌子,和拧螺丝时位置产生一点误差就会产生巨大的力。
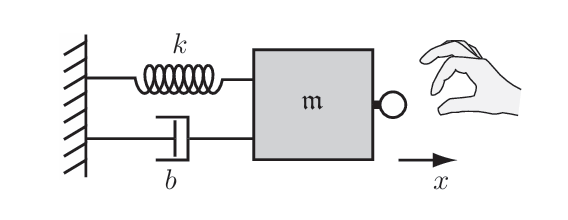
impedance control就是让机器人末端呈现出质量(mass),弹簧(spring),阻尼(damper),通过控制器让机器人像一个质量-弹簧-阻尼系统。m大不容易加速,b大运动会被强烈阻尼,k大推开一点就会产生反抗力,所以mkb大对应高阻抗/抗扰动强,反之亦然。经典的方程如下:
- 将公式进行拉普拉斯变换:
Y(s)是admittance表示力引起的运动变化。好的运动控制器是high impedance,好的里控制器是high admittance。将系统推广到多维,MBK是虚拟的质量、阻尼、刚度矩阵。
- impedance control是测量末端运动,产生力,比如说触觉手柄,向前运动,反馈一个向后的力。Admittance control使用力传感器,根据力计算一个期望运动,如拖动示教,给一个力之后主动让开。理论上,impedance-controlled robot 应该只和 admittance-type environment 耦合。admittance-controlled robot 应该只和 impedance-type environment 耦合。